I was intrigued when I saw the Great Planes Electrify VFO,
but wished that it was a bit smaller. I ended up building a clone
version out of depron foam, scaled down to about 75% of the size of the
original. On my VFO75 I have carbon-fiber support rods around the
bottom, and kevlar thread (instead of rods) for support around the
upper section. It turned out to be a fun aircraft, but somewhat of a
handful to fly.
When the E-flite Hyper Taxi
came out I bought one as soon as I could, and I've enjoyed it
immensely. It got me to thinking about running the Hyper Taxi's AS3X
board in my VFO75, and with the boards being available I gave it a
shot. The result is a stabilized VFO75 that's more enjoyable to fly.
Take-offs and landings are easier, and I no longer need to give it lots
of up-elevator input to maintain forward flight.
With the
VFO75 having a larger motor and battery, a separate speed controller is
necessary. An extra servo channel is available on the AS3X board, so I
connected it to the speed controller and mixed it in the transmitter to
follow the throttle channel. The 2S lipo battery is wired to the speed
controller and to the AS3X board (and to a battery monitor).
The
power draw of the HXT500 servos is larger than the Hyper Taxi's linear
servos, so I connected the +5V wires on the servos (red wire) to the
+5V output of the speed controller's BEC (and not to the +5V wires from
the AS3X board). The ground wires (black) are all connected together,
and servo signal wires go to the AS3X board. So, all that the AS3X
board needs to provide are servo-output signals, and there's no chance
of overloading it.
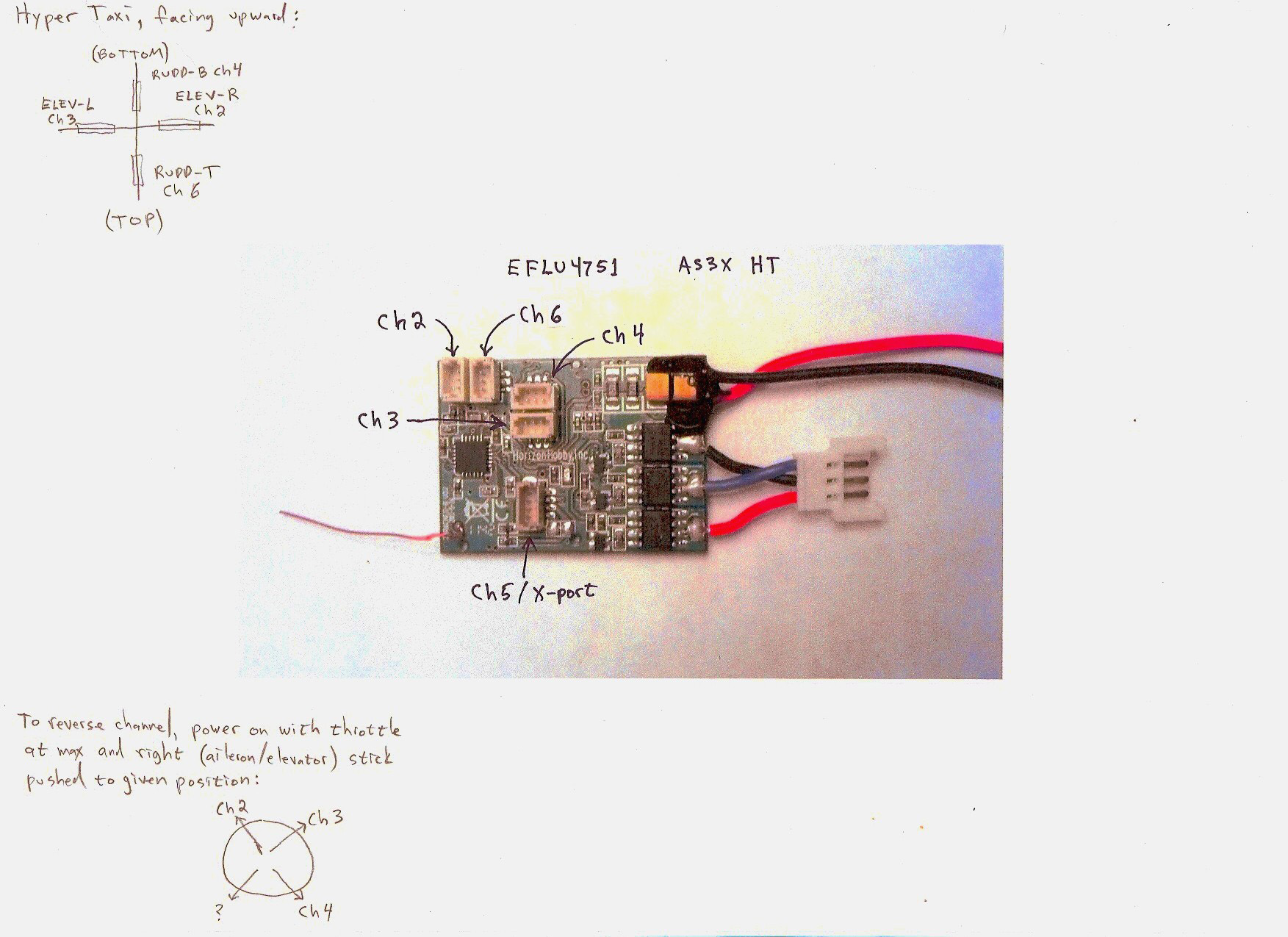
Here is a diagram showing the servo-channel locations on the AS3X EFLU4751 board (click to enlarge):
The cheapest way I've found to get 3-pin nano-JST male connector-pigtails that plug into the board is to cut them off of AS2000 servo reversers.
(These reverser cords are sometimes included with E-flite linear
servos. Be aware that on the female side of these cords the
signal and +5V pins are soldered together.) See the parts list
below for the 4-pin nano-JST pigtail that plugs into the 'ch5/X-port'
connector.
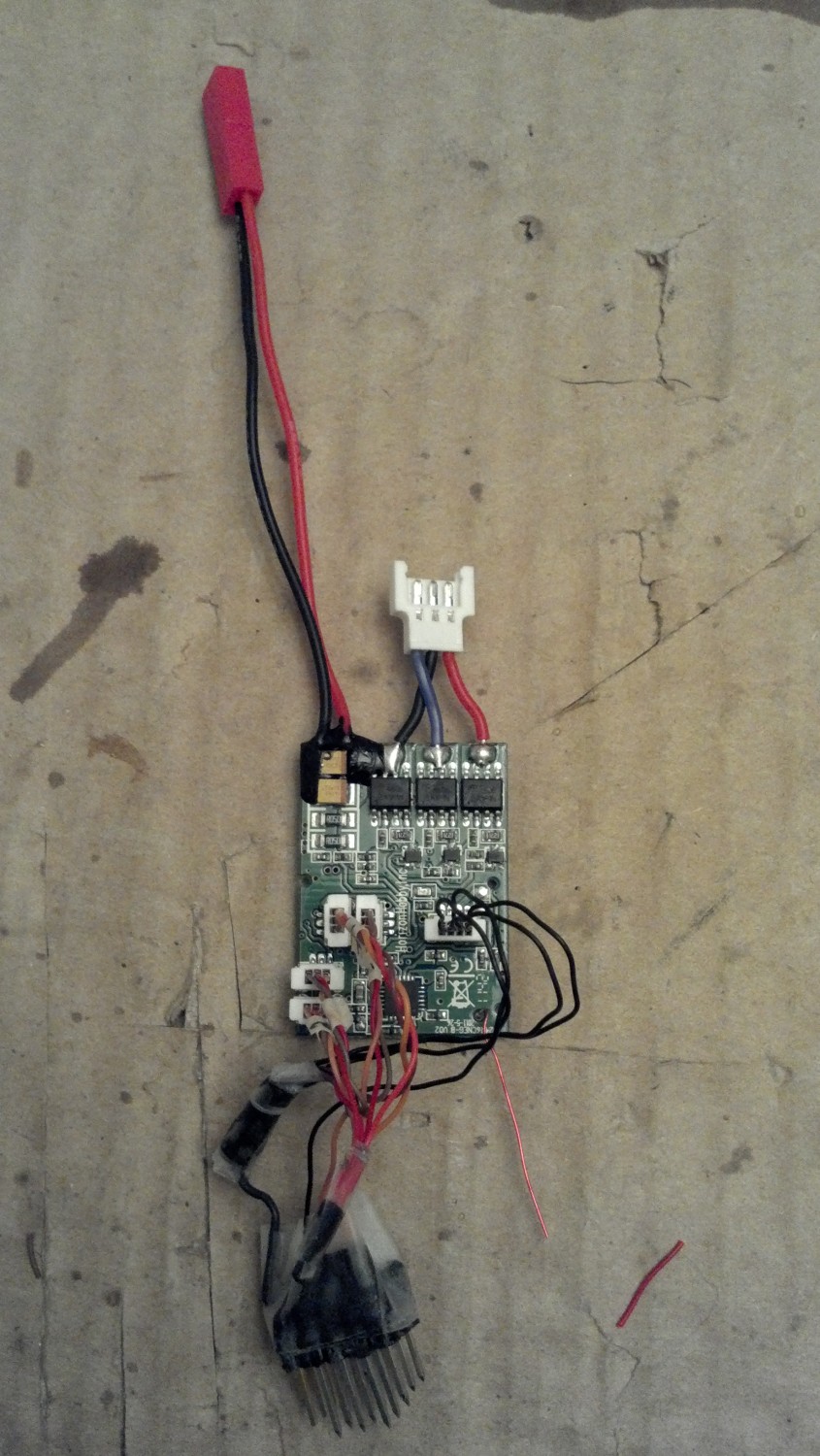
Using five 3-pin headers I soldered up a header block for the HXT500-servo and speed-controller connectors to plug into:
One great thing about the AS3X board is that three of the
servo outputs can be reversed. This is accomplished powering up the
board with the throttle at maximum and the aileron/elevator stick
pushed to the position shown in the diagram. The procedure is the same
as the one for the AR6410 board and is described in more detail in the manual for the AR6410LBL.
The
transmitter is configured as a simple 4-channel plane (throttle,
aileron, elevator, rudder), and the AS3X board handles the mixing for
the 4 control surfaces. Because the 'ch6' output is not reversible, I
first figured out which of the "rudder" control surfaces it could
operate in the correct direction. Then, as I connected the other
surfaces, I reversed the servo outputs as needed (I ended up reversing
one of them). It was also important to confirm that the gyro
stabilization was happening in the correct direction.
In
flight the control surfaces can be a bit jittery, most likely because
of vibration affecting the AS3X board. I added more thread in an 'X'
pattern between the foam sections, making them more rigid; and I
mounted a piece of balsa wood under the AS3X board, between pieces of
double-stick foam, to reduce vibration.
My VFO75 has turned
out great. I'd expect an AS3X Hyper-Taxi board would also work well on
the larger-sized Electrify VFO kit. One caveat I'd say regarding the
VFO or the Hyper Taxi is that you really need to be to able to do
3D-style hovering; if not then better to work with an EPP foamie like
the Leadfeather Yak55 first.