Here's a build I made of a 450-sized quadcopter using the
Hobbyking SK450
frame and the KK2.0
controller board.
In "self-level" mode it's a very stable and predictable flyer -- it's a
great first-build for someone just getting into multicopters. In
"acro" mode, it can be setup to be very acrobatic, capable of
fast-forward flight and tight flips.
The mounting hole pattern on the 2210N motors
I used is different from the pattern of the mounting plates that come
with the SK450 kit. I used four wooden mounting plates from RA Cores (http://www.racores.com/indoor_accessories.html , large).
RC911's KK2 v1.6++: User RC911 on 'rcgroups' has posted a
patched version of the 1.6 firmware that adds a very-nice "SL stick mixing" mode. See here for the patched v1.6++ firmware.
I
have the stick-scaling values on the KK2.0 turned up to 90 (for fast
flips), and 75% expo setup on my transmitter. When starting out,
leave the stick-scaling values at their default values (30) and
increase them if you want faster response.
For transmitter settings, the best thing is to create a simple ACRO
model -- the KK2 board takes care of all the mixing, etc. On the
transmitter you'll want to link channel 5 to a switch and setup "Self
Level: Aux" in the KK2 so you can turn self-leveling on and off.
There's a "receiver test" screen on the KK2 that shows the receiver
inputs, which is useful during the initial setup. Things like
dual-rates and expo on the transmitter will work like they would for a
plane or heli.
I mounted the controller board using double-stick
foam, with a large square piece on the frame and smaller pieces
contacting the controller board at the corners and center. I
mounted nylon
spacers and the bottom from a plastic dish around the controller
board to protect it. I'm using an OrangeRX
R610 receiver, which connects to the controller board via five male-to-male
servo leads.
On multicopter setups, it is usually advisable to disconnect the red
power leads on the servo connectors on all but one of the ESCs (so one
ESC is providing the +5V power). On the KK2.0 board,
disconnecting the red leads on the M2-4 ESCs is optional because the
board only draws power from the M1 ESC connector. So, either way
should work OK. (Another option is to disconnect all the red
power leads and use a separate UBEC like this one.)
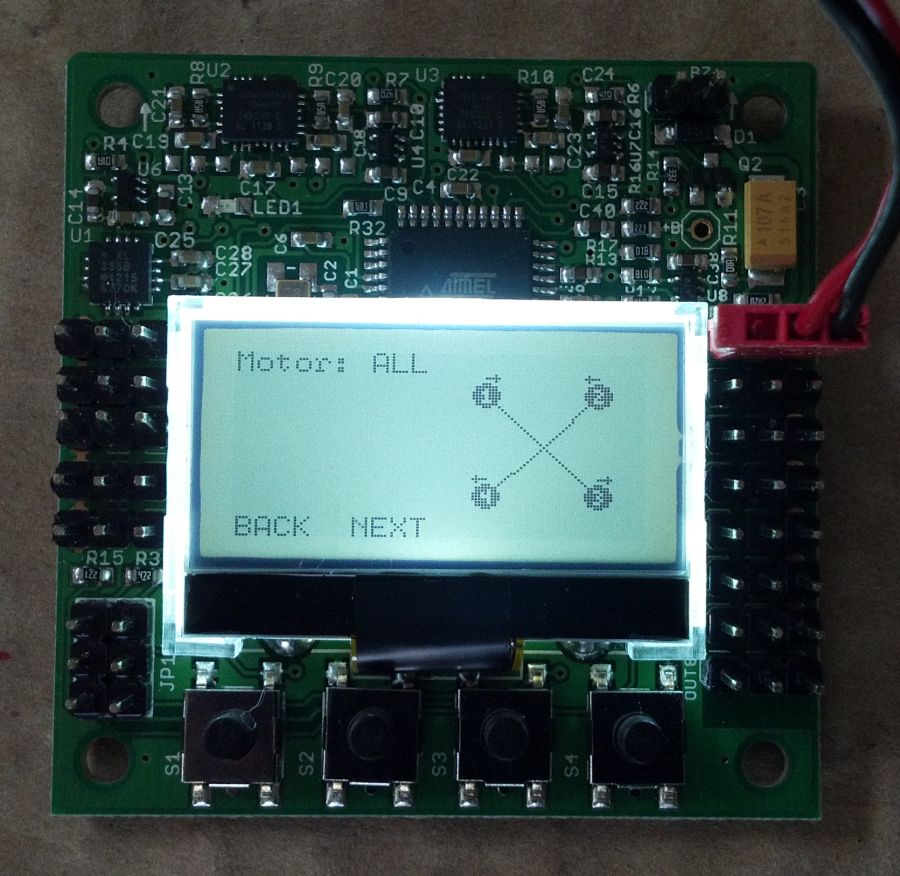
During the setup, it's very important to make sure that all the motors
are rotating in the right directions, and all the props are setup to
push air downward. If you go into "Show Motor Layout" on the KK2
menu you should a screen like the picture below, which shows the
direction that each motor needs to be rotating. If those are
correct then confirm that each prop is pushing air downward.
For battery low-voltage alarming I have a 3S
battery monitor and I use the voltage-alarm input on the
KK2.0. To access the alarm input I had to solder a pin onto the
KK2.0 board -- the pin is circled in this
picture. With the "Alarm 1/10 Volts" setting at 107 the KK2.0
will beep first as an early low-battery warning, and then the 3S
battery monitor will beep and flash red when it's really time to land. I use the socket-pins from servo (or red JST) connectors, solder them to the ends of wires, and cover with heat shrink to create the single-pin socket connectors -- see this pic.
I rigged up yellow
and blue
LED light strips on the arms, with the strips facing downward over the
lengths of the arms and then upwards at the ends to shine on the
props. I also put a couple of discrete LEDs on the front to help
with
orientation. I run the LEDs via an old brushed speed controller
plugged into an extra channel on the receiver, allowing their
brightness to be controlled using a knob on the transmitter.
Weight without battery: 800g / 1.76 lb
Weight with battery: 1008g / 2.22 lb