HK-500CMT Flybarless

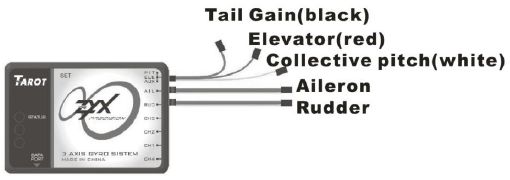
The tail servo is connected to CH4.
Here are the settings I'm using on the main 'Configuration' screen:Servo Type: Tail servo is 1520us, swash plate servos are 1520us digital
Swash Type: 120 degree CCPM
Servo Rev: CH1(Normal), CH2(Reverse), CH3(Normal)
Swash Travel: Aileron Travel = 80, Elevator Travel = 80
Collective Pitch: 70
Tail Setup: Servo Trim = 0, Tail Limit A = 100, Tail Limit B = 125
Gyro Dir: Pitch = Reverse, Roll = Normal, Yaw = Normal
Pyro Opt: Optimization Direction = Reverse
Here is a copy of my saved FBL Gyro configuration file: HK500FBL.ini. My settings result in a very agile heli that may feel too "touchy" for some. Selecting the "F3C" or "3D Soft" presets will give a softer feel.Main Rotor | Roll Agility = 50, Roll Gain = 32, Pitch Agility = 50, Pitch Gain = 30
Tail Rotor | Yaw Rate L = 50, Yaw Rate R = 50, Gain = 100
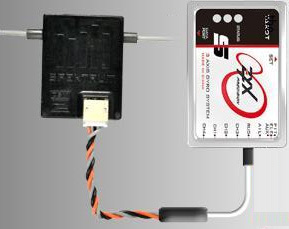
When installing the RJX Flybarless Head I used the upper-most hole on the center hub, as shown in this pic. The linkage rods going from the swashplate to the blade grips are 54mm center-to-center. Here is the manual for the RJX Head. For the initial alignment I put the blade-grip bolts into their holes and eyeballed them as being vertical when the swashplate was level.AIL/ELE/THR reversed
Aileron/Elevator expo: 35%
Rudder expo: 50%
Throttle Curve Normal: 0,55,75,92.5,100
Throttle Curve IdleUp: 100,90,85,90,100
Pitch Curve Normal: 35,43,52.5,70,90.5
Pitch Curve IdleUp: 0,30,50,70,100
Gyro Rate: 40%

