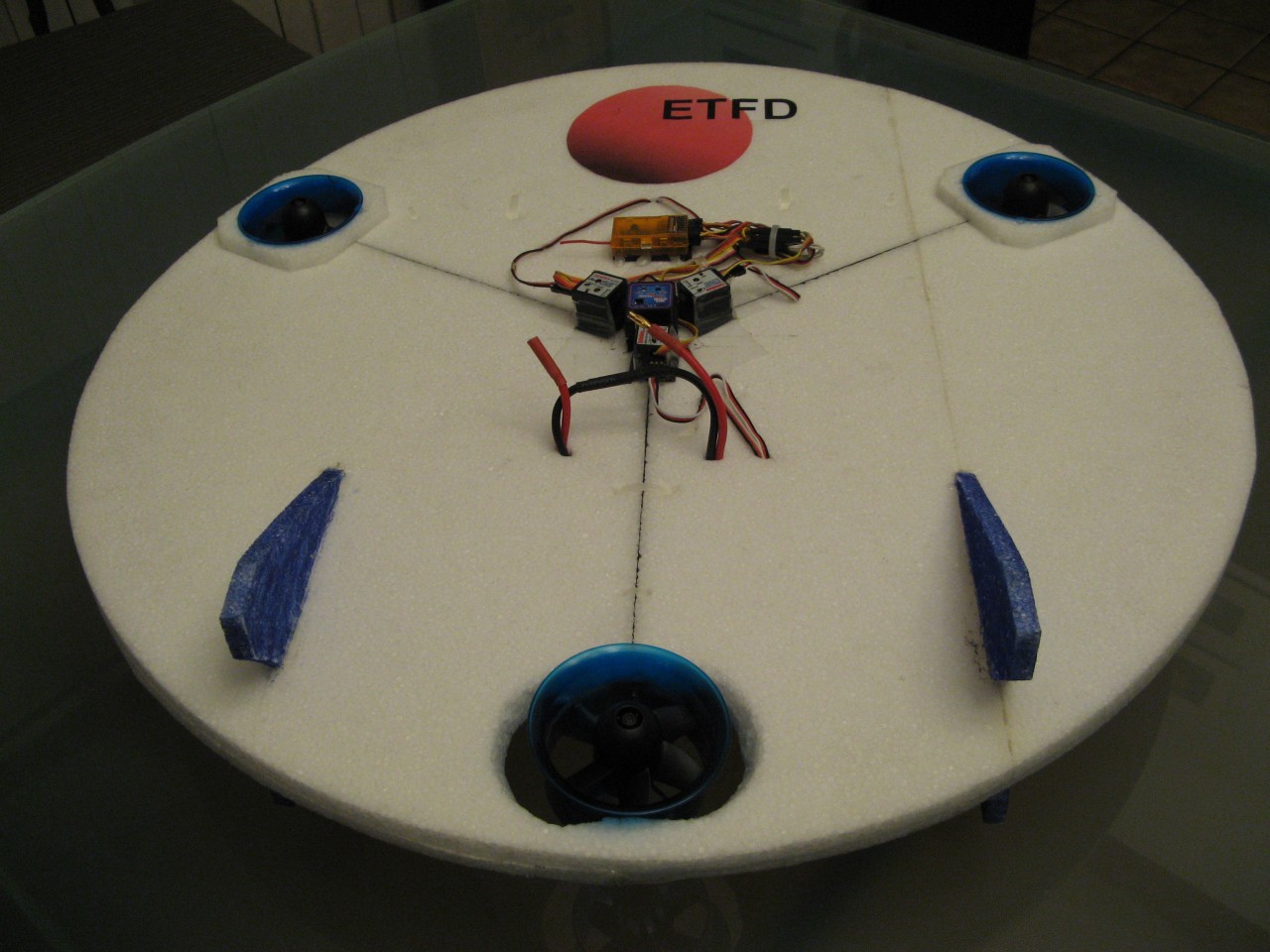
Here's my creation, a flying EPP foam disc that uses three 64mm EDF
units. It can float and move about; with flight characteristics similar
to a fixed-pitch helicopter (like a Blade mSR). A lot of my inspiration
came from the RCExplorer Tricopter, and the
transmitter setup is very similar.
The disc is quite durable; I've had to crash it hard to do any damage
to it. It's fun in that it can safely bump into other objects, and I
try to do things like roll it horizontally along walls. It's surprising
how well the disc flies, and it gets a lot of attention.
Four gyros are used for stability -- one for each EDF unit, and one for
the yaw (rotational) control. The thrust on the EDF units controls the
angle of the disc in all directions, and the rear unit is rocked left
and right to achieve yaw (rotational) control. While rotating, the disc
stays at the same angle in the air because of the gyro compensation.
The disc is 24" in diameter, made from two layers of 9mm 1.9# EPP foam.
On the bottom are three legs made of 4 pieces of the foam (7mm x 4mm x
4mm). The EPP "fins" on the back help to maintain orientation while
flying. For glue, I used mostly UHU-Por during assembly. Weight
without the battery is about 20oz.
The ETFD makes a great sound while flying, with the three EDF units
whirring away. It sucks down a lot of power -- 30 to 75 amps -- and can
fly with a 3S or a 4S lipo in the 2200 to 4000 mAh range. I've found
that it flies best with a 4S 3000-3300mAh 30C-40C battery (more
available thrust), but the speed controllers run hotter with 4S. Flight
time is 3-4 minutes.
I put six carbon-fiber strips into the disc for reinforcement, glued in
with CA (3 on top, 3 on bottom; see pics). The front two EDF units have
foam "collars" that make their mount positions a little higher and more
even with the rear unit.
The rear EDF unit is held at the two pivot points, and its opening is
elongated to leave room for it move. The EDF housing has some
pre-drilled holes at the right locations, but they are oval (not
circular). I found that it worked better to drill new holes.
The bottom pivot is just a machine screw epoxied onto the foam. For the
upper pivot, the EDF housing is attached directly to the servo arm via
the mounting screw. A longer screw is needed; I think one of the HXT900
servo-mounting screws works. I also put in a washer. Putting a second
screw through the housing and into the servo arm prevents it from
rotating. One thing to watch out for is to have the EDF pivot-position
centered when the servo is centered. The servo will be run by the gyro,
so there's no way to adjust the center point after it's all assembled.
You have to angle-in a screwdriver to tighten the screws (unless you
remove the EDF motor), but it's not that hard to do.
Before mounting the EDF units, it's good to disassemble them and then
reassemble with thread-lock on the screws. After taking out the screw
on the front on the rotor it pulls off, and then the motor-mounting
screws are accessible. It's also good to test each EDF unit with an ESC
before installation. I applied dabs of hot glue to hold them in the
disc.
The ESCs are Hobbywing Pentium 30A. At one point I tried using Hobbyking SS Series 40-50A ESCs,
but their response time seemed to be too slow and the disc would wobble
uncontrollably. The Pentium 30A ESCs would overheat, so I added extra
heat sinking made from aluminum soda can material. I put some on the
top and bottom, cutting away some of the existing heat shrink and
putting in heat-sink compound. I re-wrapped them with a bit of 30mm heat shrink. The 5V power
inputs coming from the ESCs are tied together, which works fine because
their BECs are the linear type (not switching). The Hobbywing Pentium 40A ESC might be
able to stay cool enough without modification.
The battery mounts with velcro on the bottom and plugs into a Deans
connector. I also run the main power through a pair of 4mm bullet
connectors on the top side of the disc. This way I can turn it
right-side-up, power it up by plugging in a bullet connector, and leave
it still until the gyros initialize. The power wiring should be 12 or
10-gauge, as it needs to carry a lot of current. I use a battery
monitor to warn me when it's time to land; otherwise the ESCs may cut
out at different times, resulting in a crash.
The center gyro is an HK401B, which operates the pivot servo for yaw
(rotational) control. I have its travel limit adjustment at its minimum
setting (so that the pivot servo doesn't bind).
The three "motor" gyros are piezo-type Telebee/Zoom units that I
salvaged from old helis. The HK401B gyros could be used for the motors,
but there may be an issue with ESC arming (as described in the RCExplorer Tricopter article under
"Tricopter V1.5"). The Turnigy GR302 gyro might be another
good candidate. The gain inputs from the three "motor" gyros are
connected together and plugged into a single receiver channel.
For the transmitter setup, the starting point is to configure for a
CCPM heli like a T-Rex 450. The RCExplorer Tricopter article "Setting up your own Tricopter" was
very helpful. On the disc, the three ESCs take the place of the three
cyclic servos on a CCPM heli. The standard throttle-output channel has
no use on the disc, so it is decoupled from the throttle stick by
setting the throttle curve to a flat line. The receiver channel can
then be used for gyro gain. On my transmitter setup, I set the throttle
curve to a flat 50% line and use a programmable mix (offset) to set the
gyro gain.
It was a big help during the initial setup to connect servos to the
"motor" gyro outputs (as described in the RCExplorer setup article). I
ran into a strange issue where the piezo-type Telebee/Zoom gyros would
not setup correctly when their gain inputs were plugged into the
modified throttle channel. When plugged into the "gear" channel (Futaba
channel 5), they worked correctly. The HK401B worked fine with either
channel, so I plugged it into the modified throttle channel.
The three "motor" gyros need to configured for "rate" mode, not heading
hold (aka AVCS) mode. This is done in the transmitter gyro setup. The
pivot-servo gyro should work in either mode, but heading hold is
generally preferred (like on a heli tail setup).
I use a Futaba 9C transmitter (with a Spektrum DM8 module); here are some
of the settings:
AIL(ch1), ELE(ch2), PIT(ch6) reversed
SWASH AIL -40%, ELE +40%, PIT +75%
PIT-CURVE 0%, 40%, 50%, 65%, 100%
THR-CURVE 50%, 50%, 50%, 50%, 50%
GYRO SENS GY NOR 80%
PROG.MIX1 OFST->3:THRO 50%
AIL ELE RUD EXPO 35%
If I were building the ETFD again, I might put the pivoting EDF unit at
the "front" and have two EDFs units in the "rear". That way, during
forward flight, a single EDF unit (and ESC) wouldn't have to run harder
than the other two.