<<<
etheli.com Home Page
ArduPlane V3.3/V3.4 etMod_DiffSpoilersFix Patch:
Fixed differential spoilers support, added elevon offset
Update: This patch has been merged into the ArduPlane master code and is part of ArduPlane v3.6.0 and newer.
In v3.2 - v3.5.0 of
ArduPlane, differential spoilers are non-operational (see issue #1032). This
'etMod' patch
fixes them so they operate as described in the ArduPlane docs when
ELEVON_MIXING=0 and
ELEVON_OUTPUT>0
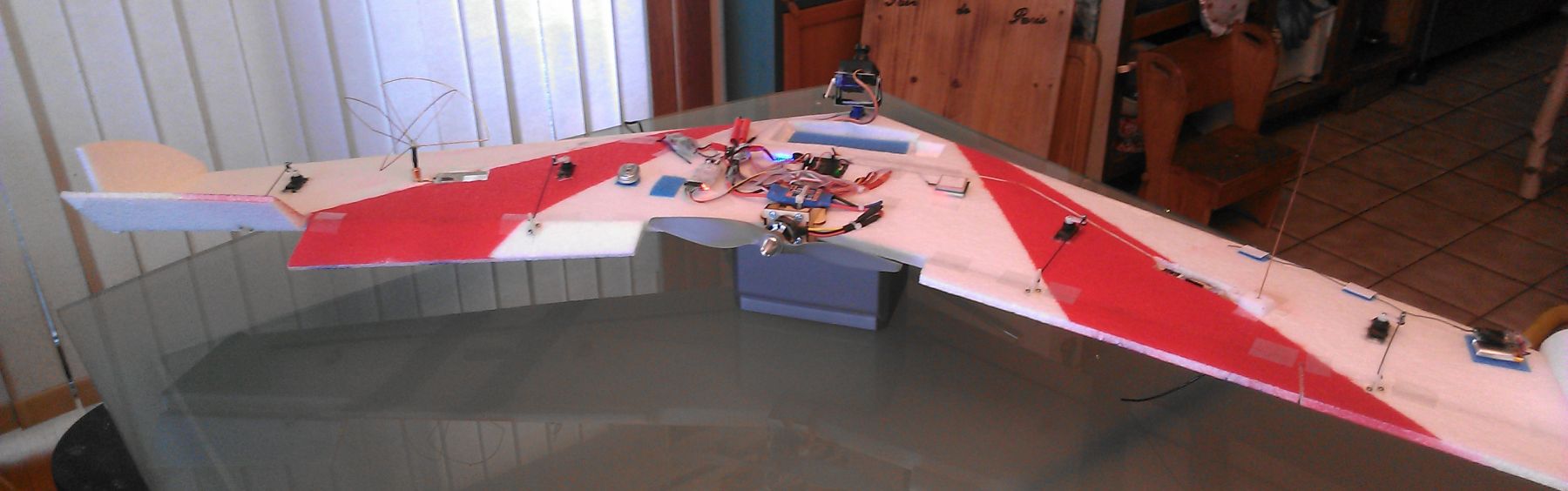
(mixing done in flight controller). All flight
modes are supported. This functionality is used on flying wings
with "split elevons" using two servos on each side (as shown in the 47"
Popwing above). The 'etMod' patch also adds the parameters
described below.
Added parameter: DSPOILR_RUD_RATE "Differential spoilers
rudder rate"
Sets the amount of deflection that the rudder output will apply to the
differential spoilers, as a percentage. The default value of 100
results in full rudder applying full deflection. A value of 0 will
result in the differential spoilers exactly following the elevons (no
rudder effect).
Added parameter: MIXING_OFFSET
The offset for the Vtail and elevon output mixers, as a percentage.
This can be used in combination with MIXING_GAIN to configure how the
control surfaces respond to input. The response to aileron or elevator
input can be increased by setting this parameter to a positive or
negative value. A common usage is to enter a positive value to increase
the aileron response of the elevons of a flying wing. The default value
of zero will leave the aileron-input response equal to the
elevator-input response.
Notes: The new parameter DSPOILR_RUD_RATE allows the rudder
effect to be "toned down." Otherwise it can be too easy to apply
too much rudder-spoiler control and stall the wing. The new
parameter MIXING_OFFSET allows the elevon mixing on a wing to be tuned
so that the "aileron" effect is greater than the "elevator"
effect. Flying wings are usually pitch-sensitive while being
difficult to roll, so this tuning is desirable. I have
successfully tested this patch (applied to ArduPlane v3.2 on APM2) in the 47"
Popwing, in Manual, Stabilized, and GPS-guided flight modes.
I've applied this modification to the ArduPlane v3.3.0
(released) version.
The firmware file for APM2 with this
patch applied is here: ArduPlane_v3.3.0rel_APM2_etMod_DiffSpoilersFix_20150715.hex
The firmware file for Pixhawk with this patch applied is here: ArduPlane_v3.3.0rel_pixhawk_etMod_DiffSpoilersFix_20150715.px4
The firmware file may be uploaded to the flight controller using the
Mission Planner (under "Install Firmware" | "Load custom firmware").
Note: These firmware files should be considered beta-test releases and are to be used at your own risk.
Here is sample set of parameters for testing the new functionality:
DSPOILR_RUD_RATE,75
ELEVON_OUTPUT,2
MIXING_OFFSET,75
RC5_FUNCTION,16
RC5_MAX,1900
RC5_MIN,1100
RC5_REV,1
RC6_FUNCTION,17
RC6_MAX,1900
RC6_MIN,1100
RC6_REV,1
The four servos are plugged into RC1, RC2, RC5 and RC6. One thing
to watch out for is that the RC5_MIN, RC5_MAX, RC6_MIN and RC6_MAX
parameters can be modified when a radio calibration is performed.
If this happens, they should be restored to values like the ones
above. The above parameter set is in this Pixhawk_etMod_DiffSpoilersFix_testSet_20150715.param
file, which may be loaded into the flight controller on the
"Config/Tuning" | "Full Parameter List" screen via the 'Load' and
'Write Params' buttons. (If the servos look like they are
randomly twitching, make sure the flight mode is not set to RTL.)
Complete source code: ardupilot-ArduPlane_v3.3.0rel_etMod_DiffSpoilersFix_20150715.zip
Set of modified files: ArduPlane_v3.3.0rel_etMod_changes_20150715.zip
This patch has been submitted as diydrones/ardupilot Pull Request #2935.
Update: I've applied this modification to the ArduPlane v3.4.0
(released) version.
The firmware file for Pixhawk with this patch applied is here: ArduPlane_v3.4.0rel_pixhawk_etMod_DiffSpoilersFix_20150930.px4
Complete source code: ArduPlane_v3.4.0rel_etMod_DiffSpoilersFix_20150930.zip
(The older v3.2.3 modification is here.)
If you have questions/comments or find this patch useful, please let me know.
Click here to
contact me
Back to etheli.com home page
