<<<
etheli.com Home Page
ArduPlane Patches for FENCE_ACTION DisarmMotor and GPS_FAIL_ACTION

Patch: Add FENCE_ACTION DisarmMotor and new FENCE_AUTOENABLE
options
I've been experimenting with APM:Plane autonomous flight using a
lightweight foam airplane, and was having good results until one day I
had a fly-away. The plane could not complete one of its turns in
the mission pattern, and instead flew off in a slow arc. Part of
the mission had the plane going inverted and doing rolls, so one
possible explanation is that the accelerometer lost its zero-level
position. Other possibilities are that the flight-controller
board mount came loose, or there was some kind of mechanical issue with
the control surfaces.
Whatever the cause, it's clear that the flight controller did not have
a good fallback response to the sensor and GPS input, which was showing
that the plane was way off course. So, I've been working on
modifications to improve this, and this "FenceActionDisarm" patch is
one of two that I've implemented.
During the fly-away, the GPS position continued to be tracked and
received via telemetry (see above pic). If a geo-fence was in place, a breach
would have been detected and the plane would have attempted to fly back
to the return point, but it was already attempting (and failing) to fly
back, so this wouldn't have helped. What I see as needed is a new
FENCE_ACTION option that can shut off the motor -- this can at least
down the plane before it flies further away.
This patch adds a new FENCE_ACTION action called "DisarmMotor", where,
after a geo-fence breach lasting more than five seconds is detected,
the flight mode is changed to STABILIZED and the motor is
disarmed. The idea is to have the plane glide down to the ground
as gently as possible.
When testing, I found that I really wanted options for having the
geo-fence be automatically enabled when entering AUTO mode or when
arming the motor, so I added the following options to the
FENCE_AUTOENABLE setting: AutoModeEnable,
AutoModeEnableDisableFloorOnly, and MotorArmEnable.
I've successfully flown and tested this patch on my lightweight foam
airplane. This patch has been submitted as diydrones/ardupilot Pull Request #3385. Below is a doc update.
----
Action on geofence breach (ArduPlane:FENCE_ACTION)
What to do on fence breach. If this is set to 0 then no action is
taken, and geofencing is disabled. If this is set to 1 then the plane
will enter GUIDED mode, with the target waypoint as the fence return
point. If this is set to 2 then the fence breach is reported to the
ground station, but no other action is taken. If set to 3 then the
plane enters guided mode but the pilot retains manual throttle control.
If set to 4, after a fence breach lasting more than five seconds the
flight mode is changed to STABILIZED and the motor is disarmed (glide
to ground).
Value Meaning
0 None
1 GuidedMode
2 ReportOnly
3 GuidedModeThrPass
4 DisarmMotor
----
Fence automatic enable (ArduPlane:FENCE_AUTOENABLE)
When set to 1, geofence automatically enables after an auto takeoff and
automatically disables at the beginning of an auto landing. When on the
ground before takeoff the fence is disabled. When set to 2, the fence
autoenables after an auto takeoff, but only disables the fence floor
during landing. When set to 3, geofence automatically enables after the
AUTO flight mode is engaged and automatically disables at the beginning
of an auto landing. When set to 4, the fence autoenables after the AUTO
flight mode is engaged, but only disables the fence floor during
landing. When set to 5, geofence enables after the motor is armed (and
does not automatically disable later). It is recommended to not use
this option for line of sight flying and use a fence enable channel
instead.
Value Meaning
0 NoAutoEnable
1 AutoTakeoffEnable
2
AutoTakeoffEnableDisableFloorOnly
3 AutoModeEnable
4 AutoModeEnableDisableFloorOnly
5 MotorArmEnable
Patch: Add GPS_FAIL_ACTION and XTRACK_FAIL_LIM
parameters
This "GPSFailHandler" patch is the second of two patches I've
implemented for better APM:Plane handling of possible fly-away
situations. In tests that I've done with the current code, if the
GPS fails (i.e., broken wire, lost fix) when flying in a GPS-dependent
mode, the plane's heading becomes uncontrolled.
To address this, I've implemented a new parameter called
GPS_FAIL_ACTION, which sets the action to be taken when a GPS failure
is detected while in the AUTO, GUIDED, RTL or LOITER flight mode.
A GPS failure is when its data connection or its fix is lost for more
than five seconds. The available options are: Enter the
CIRCLE flight mode (indefinitely), enter the CIRCLE flight mode for a
period of time and then disarm the motor, or disarm the motor
immediately after a GPS failure is detected (after the five
seconds). While in CIRCLE mode, if a GPS fix is regained then the
previous flight mode is restored.
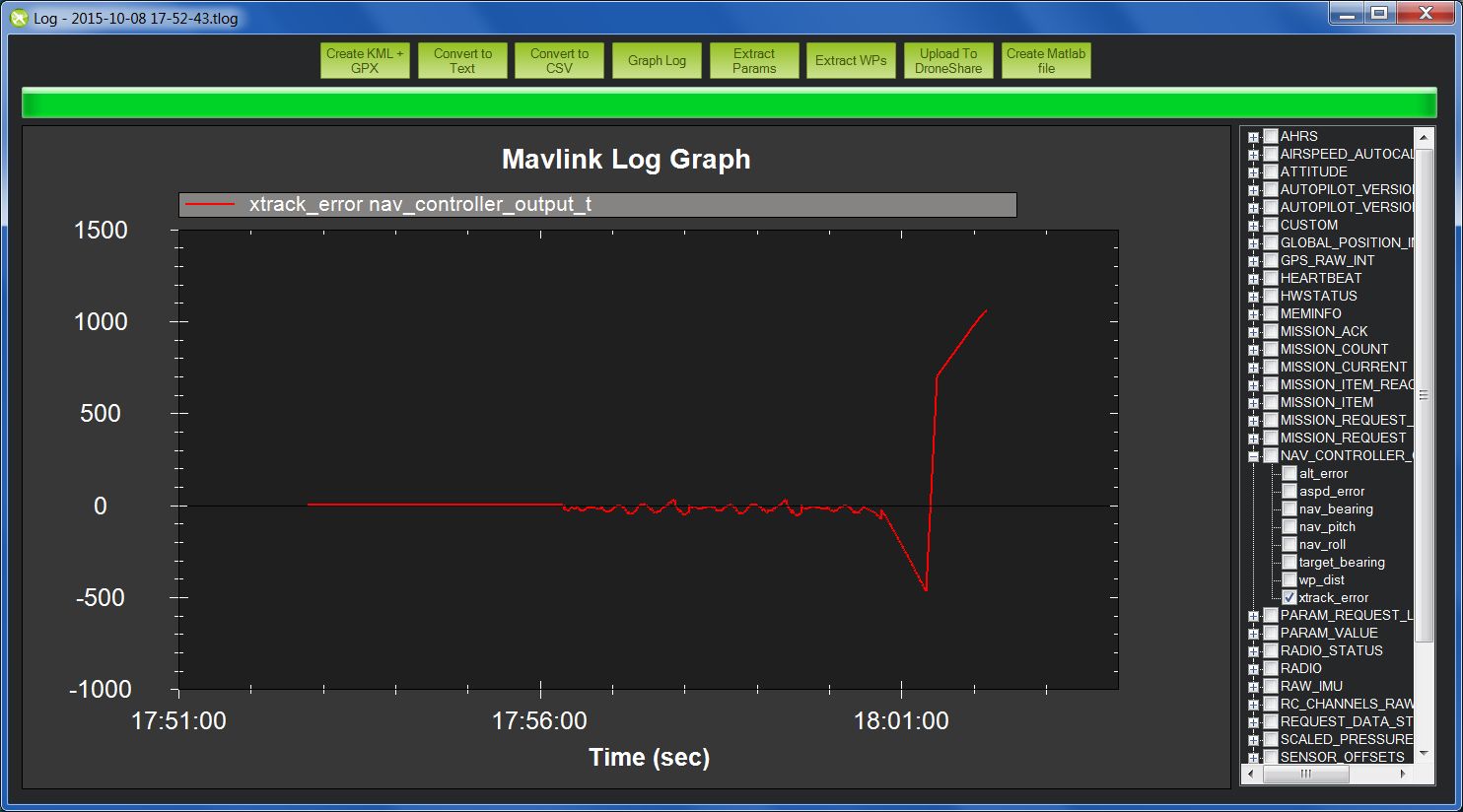
When I had a fly-away while experimenting with APM:Plane autonomous
flight, I noticed in the telemetry data that the 'xtrack_error' values
clearly indicated when the problem occurred (see above pic). To make use of this,
I've also implemented a new parameter called XTRACK_FAIL_LIM:
When this setting is greater than zero, the fight mode is AUTO, GUIDED,
RTL or LOITER, and the navigation crosstrack error (xtrack_error) is
larger than this setting for more than five seconds, the action
configured by GPS_FAIL_ACTION will be taken. In my testing I
found that an XTRACK_FAIL_LIM value of 200 is effective for detecting
failures.
I've successfully flown and tested this patch on my lightweight foam
airplane. This patch has been submitted as diydrones/ardupilot Pull Request #3386. Below is a doc update.
For those who would like to test GPS failures, below is code that I
used at the top of the 'update_GPS_10Hz()' function in the
"ArduPlane.cpp" file. When the RC channel 5 input is less than
1100, the GPS data connection is disabled:
// *** temp DEBUG test ***
static bool last_dtstflg = (hal.rcin->read(4)
> 500 && hal.rcin->read(4) < 1100);
bool dtstflg = (hal.rcin->read(4) > 500
&& hal.rcin->read(4) < 1100);
if (dtstflg != last_dtstflg) {
gps.lock_port(0, dtstflg);
last_dtstflg = dtstflg;
if (dtstflg) {
gcs_send_text(MAV_SEVERITY_WARNING,
"DEBUG gps-fail simulate FAIL");
} else {
gcs_send_text(MAV_SEVERITY_WARNING,
"DEBUG gps-fail simulate OK");
}
}
----
Action on GPS Fail (ArduPlane:GPS_FAIL_ACTION)
Action to be taken when a GPS failure is detected while in the AUTO,
GUIDED, RTL or LOITER flight mode. A GPS failure is when its fix is
lost for more than five seconds. If 0 then no action. If 1 then change
to CIRCLE flight mode (and restore the previous flight mode if a GPS
fix is regained). If 2 through 7 then change to CIRCLE flight mode for
the given time, and then, if a GPS fix has not been regained, disarm
the motor. If a GPS fix is regained then the previous flight mode is
restored. If 8 then change to STABILIZED flight mode and disarm the
motor immediately (glide to ground).
Value Meaning
0 NoAction
1 Circle
2 Circle5SecDisarm
3 Circle10SecDisarm
4 Circle30SecDisarm
5 Circle1MinDisarm
6 Circle2MinDisarm
7 Circle5MinDisarm
8 DisarmMotor
----
Crosstrack Failure Limit (ArduPlane:XTRACK_FAIL_LIM)
When this setting is greater than zero, the fight mode is AUTO, GUIDED,
RTL or LOITER, and the navigation crosstrack error (xtrack_error) is
larger than this setting for more than five seconds, the action
configured by GPS_FAIL_ACTION will be taken. The setting is specified
in meters. A large crosstrack error can indicate sensor or mechanical
failure. A value of 200 (meters) is effective for detecting failures.
These files are for a build with both patches applied to the APM:Plane v3.4.0 release code:
Firmware file for PX4-V2 (Pixhawk) boards: ArduPlane-3.4.0rel_etFenceGPSfHdlr_px4-v2_20151224.px4
Firmware file for PX4-V1 (PX4MiniAIO) boards: ArduPlane-3.4.0rel_etFenceGPSfHdlr_px4-v1_20151224.px4
Complete source code fileset: ArduPlane-3.4.0rel_etFenceGPSfHdlr_20151224.zip
Code on GitHub: https://github.com/ethomas997/ardupilot/tree/ArduPlane-3.4.0rel_etFenceGPSfHdlr
These files are for a build with both patches applied to the APM:Plane v3.5.0beta1 code:
Firmware file for PX4-V2 (Pixhawk) boards: ArduPlane-3.5.0beta1_etFenceGPSfHdlr_20160123_px4v2.px4
Firmware file for PX4-V1 (PX4MiniAIO) boards: ArduPlane-3.5.0beta1_etFenceGPSfHdlr_20160123_px4v1.px4
Complete source code fileset: ArduPlane-3.5.0beta1_etFenceGPSfHdlr_20160123.zip
Code on GitHub: https://github.com/ethomas997/ardupilot/tree/ArduPlane-3.5.0beta1_etFenceGPSfHdlr
The firmware files may be uploaded to the flight controller using the
Mission Planner (under "Install Firmware" | "Load custom firmware").
Note: These firmware files should be considered beta-test releases and are to be used at your own risk
If you have questions/comments or find these patches useful, please let me know.
Click here to
contact me
Back to etheli.com home page
